Movimiento oscilatorio amortiguado
Cualquier sistema oscilante libera energía hacia el medio que le rodea. Como en cada periodo gasta cierta fraccion de la energia inicial con la cual comenzo a moverse, en consecuencia, su amplitud y velocidad tambien decrecen en el tiempo; después de varias oscilaciones, dependiendo de la intensidad con la cual interactúa con el medio que le rodea, el sistema se detiene. Toda la energía que tenía pasó como energía térmica al ambiente, por efecto de las fuerzas de fricción que intervienen en el proceso.
A continuación se analiza el movimiento oscilatorio amortiguado de un cuerpo de masa M sometido a la acción de una fuerza disipativa con dependencia proporcional de la velocidad (f v = - λ v ), donde λ es el coeficiente de fricción o viscosidad; además de la fuerza restauradora (f k = -kx)
d 2 x /dt 2 + λ dx /dt + ω o 2 x = 0, donde la frecuencia angular natural es ω o = 2 πf o = (k/M) 1/2 , yf o es la frecuencia natural de vibración.
La solución de esta fórmula diferencial es:
x(t) = x o e -t/ τ sen ( ω t + φ ),
donde x o es la amplitud de las oscilaciones, τ el tiempo de relajación del sistema, es decir el intervalo de tiempo que debe transcurrir para que su amplitud x o disminuya hasta x o /e (e = 2,7182), la frecuencia angular sin amortiguamiento viene dada por: ω = [ ω o 2 - (λ/2M) ] 1/2 y φ es el ángulo de fase.
Por consiguiente, esta frecuencia natural amortiguada ω es menor que la frecuencia natural ω o , debido al efecto disipador de energía.
Por supuesto, la velocidad será:
v(t) = dx/dt = x o e -t/τ [-(1/τ) sen (ω t + φ) + ω cos(ω t + φ)].
Como en esta última expresión aparece el factor e -t/τ , se concluye que la velocidad decae también exponencialmente con el tiempo.
A continuación, es interesante analizar el efecto que tiene la disipación de la energía a través de la fricción, sobre el movimiento del sistema; dependiendo del valor del coeficiente de viscosidad λ en comparación con los parámetros que caracterizan al sistema, este oscila o no; oscila o amortigua. A partir de la relación de ω se puede comparar λ con 2(λM) 1/2 , o el periodo To
a) MAS cuando λ = 0 ,
b) sub amortiguado cuando ω > 0, lo que es equivalente a
λ < 2(kM) 1/2 , o T o < 2πτ ,
c) críticamente amortiguado sí
λ = 2(kM) 1/2 , o T o = 2πτ , y
d) sobre amortiguado si
λ > 2(kM) 1/2 , o T o > 2πτ.
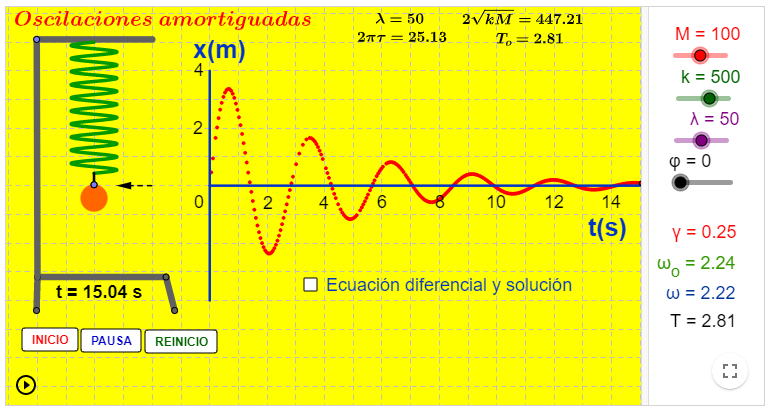
A continuación se muestran dos applets que permiten simular y analizar el comportamiento de este tipo de sistema mecánico. El de la figura 1.9 simula el movimiento de un sistema masa resorte amortiguado, aunque no se muestra el mecanismo disipador de energía. Se puede variar M (masa), k (constante elástica), λ (constante de amortiguamiento) y φ (ángulo de fase) con los respectivos deslizadores. Se puede observar cómo disminuye la amplitud x o a medida que el sistema oscila. Con el mismo se puede hacer la correspondiente gráfica del desplazamiento x(t) . Abajo se muestra la fórmula diferencial con su respectiva solución para x(t) . Debajo de los deslizadores se pueden leer los valores de la frecuencia natural ω o , la frecuencia natural amortiguada ω y el periodo T.

Disponible en: https://www.geogebra.org/m/sqAAUqqy
Actividades:
Pulse el botón REINICIO y luego el botón INICIO . Para los valores indicados ( M = 100 kg, k = 500 N/m y λ = 50 Kg/s ), el sistema oscila con movimiento amortiguado, y su desplazamiento en el tiempo lo da la gráfica
A continuación se analizan cuatro casos de singular interés:
1. El MAS . Si se elimina la viscosidad ( λ = 0 , ω = ω o ) se obtiene el MAS. Elija λ = 0 y pulse los botones de REINICIO e INICIO para activar el applet. Observe cómo las amplitudes se mantienen constantes porque el sistema no disipa energía.

Registro gráfico del MAS.
2. Movimiento sub amortiguado . El sistema oscila con movimiento amortiguado si λ < 2(kM)1/2, o To <2πτ. Mientras mayor sea λ, más rápido se amortigua el movimiento. Varíe los valores de los parámetros para apreciar sus efectos. Al elegir, por ejemplo:λ = 60, M = 100 yk = 500, se obtiene que 2(kM)1/2 = 447, de modo tal que se cumplan las condiciones anteriores, como se muestra en la figura de abajo.

Registro gráfico del movimiento sub amortiguado.
3. Movimiento críticamente amortiguado. En este caso se cumple que λ = 2(kM)1/2, o To =2πτ , y por consiguiente a partir de estos valores el sistema deja de oscilar. Elijaφ = π/2 de modo que la esfera inició su movimiento (t = 0) en el punto de retorno superior +xo

Registro gráfico del movimiento sobre amortiguado.
4. Movimiento sobre amortiguado. Cuando λ > 2(kM) 1/2 , o T o > 2πτ el sistema no oscila. Varíe los valores de k, M y λ hasta lograr las desigualdades anteriores. En este caso NO aparece el sistema masa recurso en el applet.
Por otra parte, con la finalidad de completar el análisis de este tipo de sistema mecánico, se dispone del siguiente applet, el cual simula el movimiento oscilatorio amortiguado de una esfera, aunque no se muestra el resorte elástico ni el mecanismo disipador de energía. El mismo permite graficar simultaneamente con las casillas x(t) y v(t)

Actividades
1. Repetir lo indicado para el applet anterior.
Movimiento oscilatorio forzado.
resonancia
El sistema que se analiza a continuación tiene dos propiedades intrínsecas: la elasticidad y la inercia. Como se apareció antes, la elasticidad genera la fuerza elástica restauradora que actúa sobre el cuerpo cuando ha sido desplazada de su posición de equilibrio estable; la inercia da información acerca de cómo responde la masa M a la acción de la fuerza restauradora. Estas dos propiedades actúan simultáneamente sobre el sistema determina su movimiento, y en consecuencia este vibra u oscila con la frecuencia angular ω o = (k/M) 1/2 . Por otra parte, cuando el sistema disipa energía, por medio de cualquier acción externa, su frecuencia se reduce a ω = [ ω o 2 - (λ/2M) ] 1/2; por consiguiente, vibra con más lentitud porque existe algo (la viscosidad en un sistema mecánico, por ejemplo) que se opone a su movimiento. Si además de la fuerza externa disipativa, el sistema se somete a la acción de una fuerza externa oscilante, que compense la pérdida periódica de energía, oscilará al principio con su frecuencia natural amortiguada hasta que se estabiliza, y finalmente seguirá oscilando con la frecuencia impulsora, en un caso; en otros casos, el sistema oscilará con la frecuencia impulsora desde el principio, pero cambiando la amplitud de las oscilaciones en el tiempo. Los diferentes casos se discutirán con los respectivos applets. Ver Tema Avanzado para la descripción teórica.
El applet de abajo simula un sistema masa resorte con estas características. Contiene los deslizadores M (masa), k (constante elástica), Fo (amplitud de la fuerza impulsora), ωf (frecuencia angular de la fuerza impulsora) y λ (coeficiente de viscosidad), que permiten controlarlo. Abajo se calculan ωf y ω, para poder comparar sus valores, y determinar así el tipo de movimiento que está ocurriendo. También se modela el caso asintótico correspondiente a movimiento forzado sin amortiguamiento (λ = 0), discutido ante, en dos situaciones diferentes: la resonancia y las pulsaciones. Con las casillas ubicadas en la parte inferior se pueden activar estos casos, según las ecuaciones xmax y x(t) (ver Tema Avanzado). Importante: este applet construye la gráfica punto por punto; dependiendo del explorador (Chrome, Firefox, entre otros) y del computador utilizado, puede que tarde algunos minutos en cargarlo para luego calcular. Si los puntos están muy dispersos, recomendamos activar varias veces el boton de Inicio.
Disponible en: https://tube.geogebra.org/m/2350467
Actividades:
Pulse el botón REINICIO y luego el botón INICIO. Para los valores indicados (M = 9 kg, k = 230 N/m, Fo = 200 N, ωf = 3 s-1, λ = 4 kg/s), el sistema oscila en el estado transitorio y luego se estabiliza en el estado estacionario vibrando con la frecuencia ωf = 3 s-1, como se indica en la figura 1.13.
A continuación se analizan cuatro casos de interés particular:
1. La frecuencia impulsora es mayor que la frecuencia del sistema (ωf >> ω). Para ωf = 5 s-1 , ω = 1 s-1, Fo = 4.000 N, λ = 50 kg/s, se puede observar que el sistema comienza a oscilar en su estado transitorio con la frecuencia impulsora, pero modulada por la frecuencia natural, y rápidamente se estabiliza en su estado estacionario donde se impone la acción de la fuerza oscilante externa, como se observa en la gráfica de la figura siguiente. Se puede apreciar directamente de la gráfica que el sistema vibra con un período de 1,25 s.

2. La frecuencia impulsora es menor que la frecuencia del sistema (ωf << ω). Para ωf = 0,5 s-1 , ω = 3 s-1, Fo = 1.000 N, λ = 100 kg/s, se puede concluir que el sistema comienza a oscilar en su estado transitorio con la frecuencia natural amortiguada, y rápidamente se estabiliza en su estado estacionario donde se impone la acción de la fuerza oscilante externa de nuevo, y pone vibrar al sistema con un período de 12,6 s.

Registro gráfico del desplazamiento para ωf << ω .
3. Resonancia. La frecuencia impulsora es igual a la frecuencia del sistema (ωf = ωo). En este caso, el sistema vibra con su frecuencia natural ωo modificada por la acción de la viscosidad; es decir vibra con la frecuencia ω. La fuerza externa impulsa al sistema con el mismo vaivén de la oscilación natural amortiguada; mejor dicho, el sistema oscila en sincronía con la fuerza impulsora. Bajo esta condición, aunque la amplitud de la fuerza impulsora sea pequeña, el sistema empieza a oscilar en un estado transitorio, y en cada oscilación incrementa la amplitud de sus oscilaciones, hasta alcanzar el estado estacionario donde la amplitud alcanza un máximo valor. Se dice entonces que el sistema entra en resonancia con la fuerza impulsora.
En primer lugar se analiza el modelo más sencillo del sistema sin amortiguamiento (λ = 0), para los siguiente valores: λ = 0, ωf = 3 s-1 , ω = 3 s-1, Fo = 16 N, λ = 100 kg/s. El registro gráfico de la figura de abajo muestra este comportamiento; se observa que la amplitud se incrementa proporcionalmente al tiempo tal como expresa la ecuación 1.23.c: xmax = 0,5 ao/ωo t sen(ωf t) (ver Tema avanzado). Esta situación es de esperar, ya que no existe ningún proceso disipador de energía; así que la energía que cede el agente impulsor externo en cada oscilación, la utiliza el sistema en incrementar su amplitud. La curva verde continua se graficó con la ecuación 1.23.c y la curva azul a puntos es la gráfica de la solución general; por supuesto, coinciden.

En
segundo lugar, cuando se considera el amortiguamiento (λ > 0) con los siguientes valores: λ = 3 kg/s , ωf = 3 s-1 , ω = 3 s-1, Fo = 6 N; la amplitud de
las oscilaciones crece en la etapa transitoria hasta un máximo valor, y luego
permanece constante en el tiempo, cuando se alcanza el estado estacionario, tal
como se puede observar en la curva azul de la figura que se muestra a continuación. La curva verde representa el caso anterior sin amortiguamiento cuando λ = 0.

Registro gráfico del desplazamiento para ωf = ω , λ = 0 (curva verde) y λ > 0 (curva azul) .
Con la finalidad de ahondar un poco más en el análisis del sistema
cuando entra en resonancia, se ofrece el applet que abajo se muestra donde se
grafica la amplitud xo de las oscilaciones en función de la frecuencia.
Dispone de los deslizadores Fo, M, k y λ para su control.
La curva verde a trazos corresponde al movimiento forzado sin amortiguamiento (λ = 0), en cuyo caso
ideal el sistema oscila hasta alcanzar una amplitud infinita; la roja, corresponde al modelo
del movimiento oscilatorio amortiguado (λ > 0). Se puede apreciar
el máximo de la amplitud xom como es de esperar;
el mismo ocurre para el valor crítico de la frecuencia impulsora dado por ω = [ωo2 - 2 (λ/2M) ]1/2 .También se
calculan los valores de xom , ωo y ω. Se usaron unidades del
Sistema Internacional de Unidades.
Disponible en: https://tube.geogebra.org/m/2353437
Actividades:
Para los valores indicados (M = 60 kg, k = 15 N/m, Fo = 2 N, λ = 7 kg/s), el sistema oscila en el estado
transitorio y luego se estabiliza en el estado estacionario vibrando con la
frecuencia ωc = 0,5 s-1, como se puede comprobar en la figura que sigue.


Representación
gráfica de la amplitud del desplazamiento xo en función de la frecuencia ωf.

Representación gráfica del desplazamiento para λ = 0 cuando ωf ≈ ω.
La interpretación de estos valores es la siguiente.
El sistema comienza a oscilar desde la posición de equilibrio hacia el punto de
retorno positivo; a medida que oscila con la frecuencia promedio ωm = 4,62 s-1 la amplitud de
las oscilaciones se incrementa hasta un máximo valor (aproximadamente a mitad del
tiempo Tp), y luego decrece
hasta un valor mínimo (ha transcurrido la otra mitad del tiempo Tp), para aumentar de
nuevo, y continuar así indefinidamente. De esta manera, el desplazamiento es
modulado en amplitud. Este comportamiento se repite en el tiempo (recordar que λ = 0). Tal cambio
periódico temporal de la amplitud es lo que se conoce como pulsación o batido.
Más adelante se retoma este concepto en el tema de ondas.
En
segundo lugar se analiza el modelo con amortiguamiento (λ > 0) para los siguiente valores: λ = 4 kg/s , ωf = 5 s-1 , ω = 4,24 s-1, Fo = 50 N. Se puede observar que, con la incorporación
de la viscosidad, el sistema intenta oscilar en el estado transitorio con
pulsaciones; sin embargo, en el estado estacionario se estabiliza, y continúa
oscilando con la frecuencia impulsora ωf = 5 s-1 y con el periodo Tf = 1,3 s como se indica en la figura adjunta.

Representación gráfica del
desplazamiento para λ = 4 kg/s.




Muy buena información. Gracias
ResponderEliminar